
Comparativa práctica de servos inteligentes de bus serie para robótica
Realizamos pruebas de banco con cinco servos inteligentes de bus serie populares — STS3215, ST...
Boris Kotov
11 Jun 2026
Realizamos pruebas de banco con cinco servos inteligentes de bus serie populares — STS3215, ST...
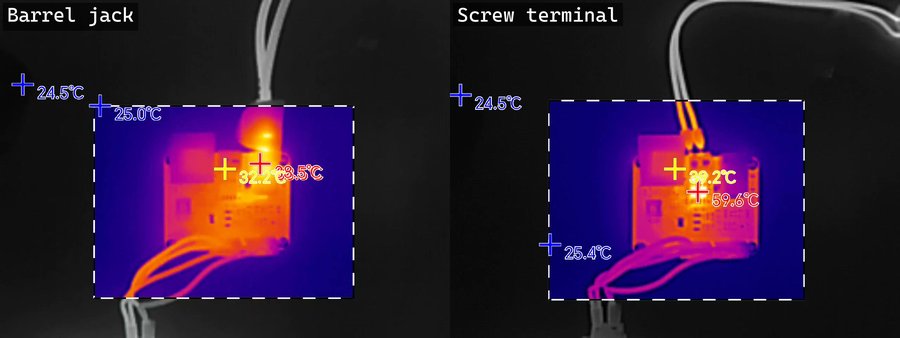
Prueba empírica de carga térmica de dos placas controladoras de servos de bus serie Waveshare en cua...
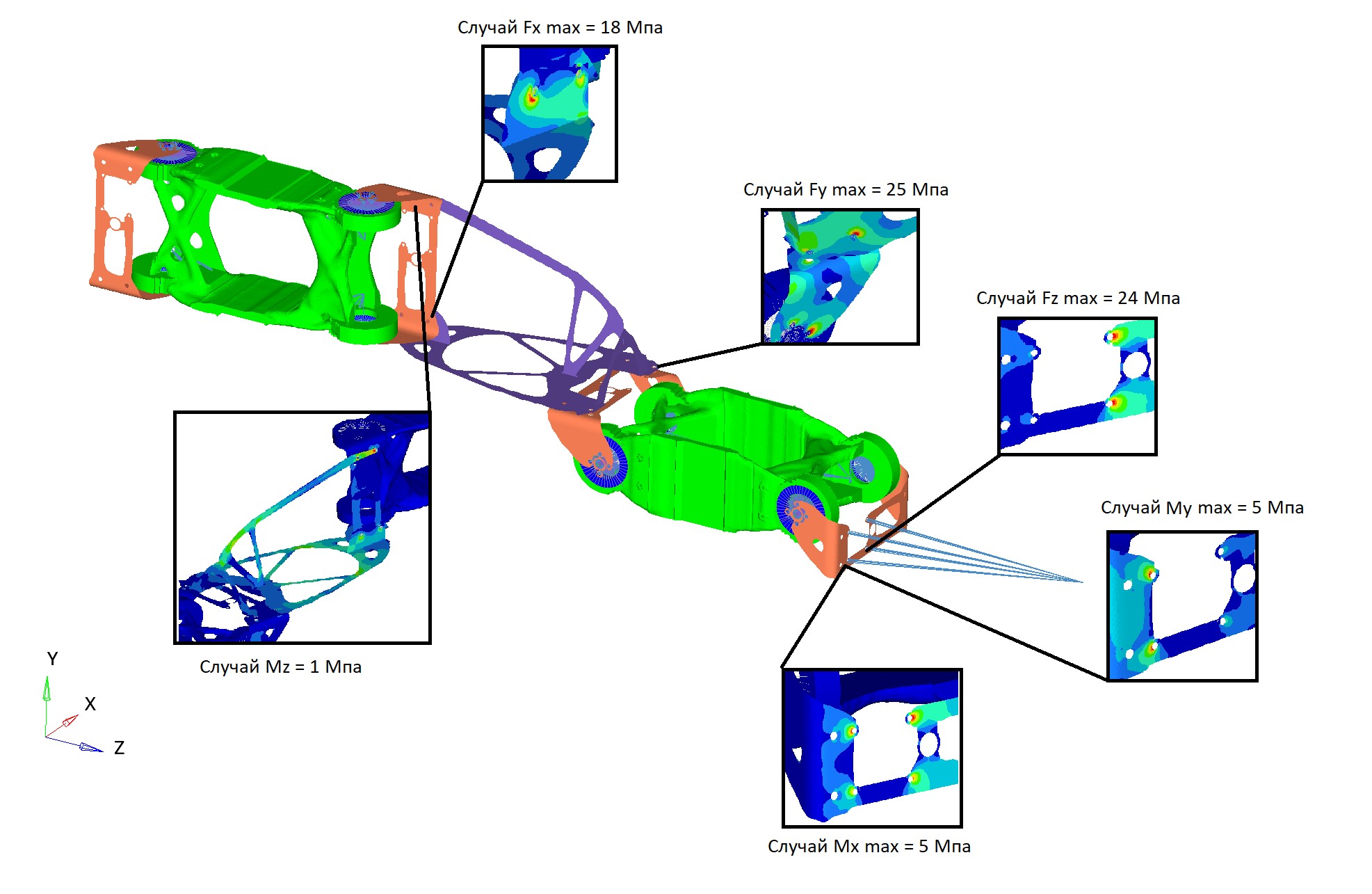
Este estudio presenta la optimización topológica de un manipulador robótico mediante el algoritmo SI...

Evaluación empírica completa del servomotor de bus serie Feetech STS3250. Las pruebas revelan una de...

Un análisis detallado del servo Feetech STS3215, explorando su rendimiento real, su precisión y su c...
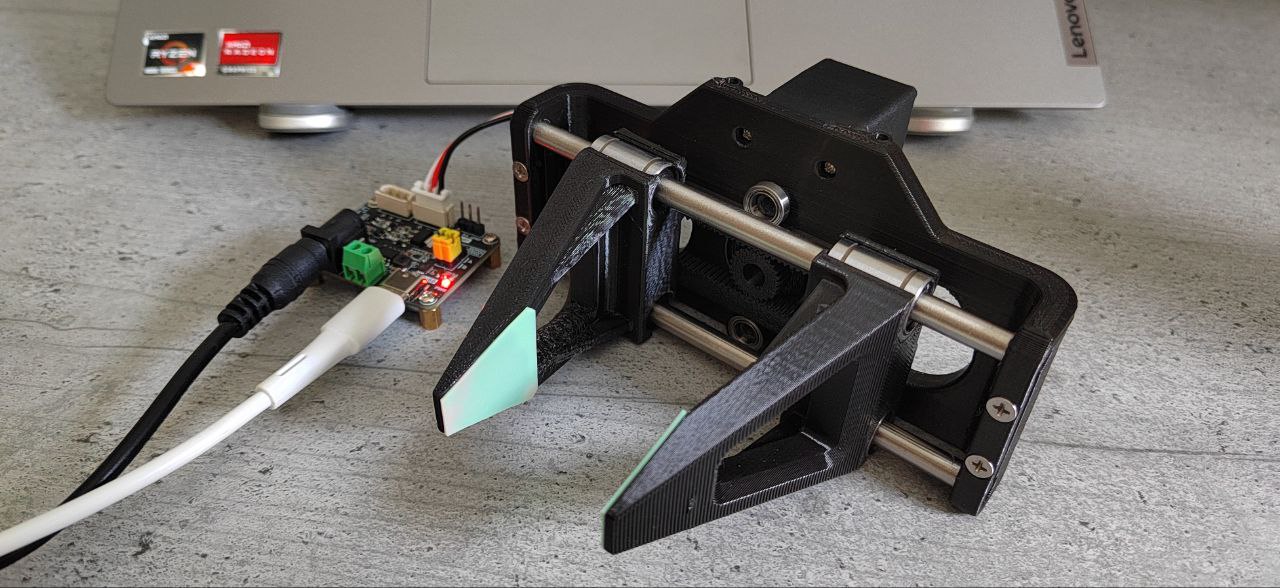
Una pinza es un dispositivo mecánico o robótico diseñado para agarrar, sujetar, manipular o transpor...
Quiero comentar cómo se llevó a cabo la selección del componente más importante del manipulador robó...
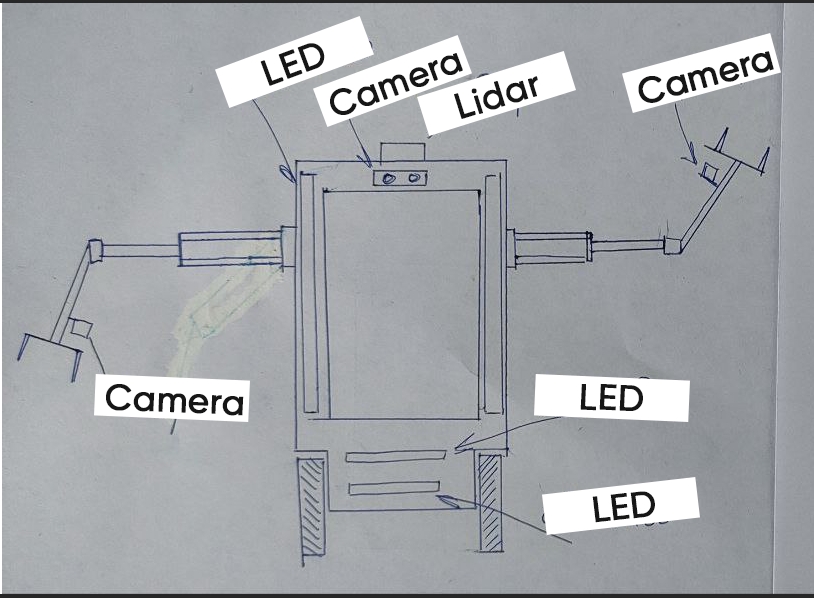
En mayo completamos la primera variación del diseño de Robo 9, mostrando su evolución desde el conce...
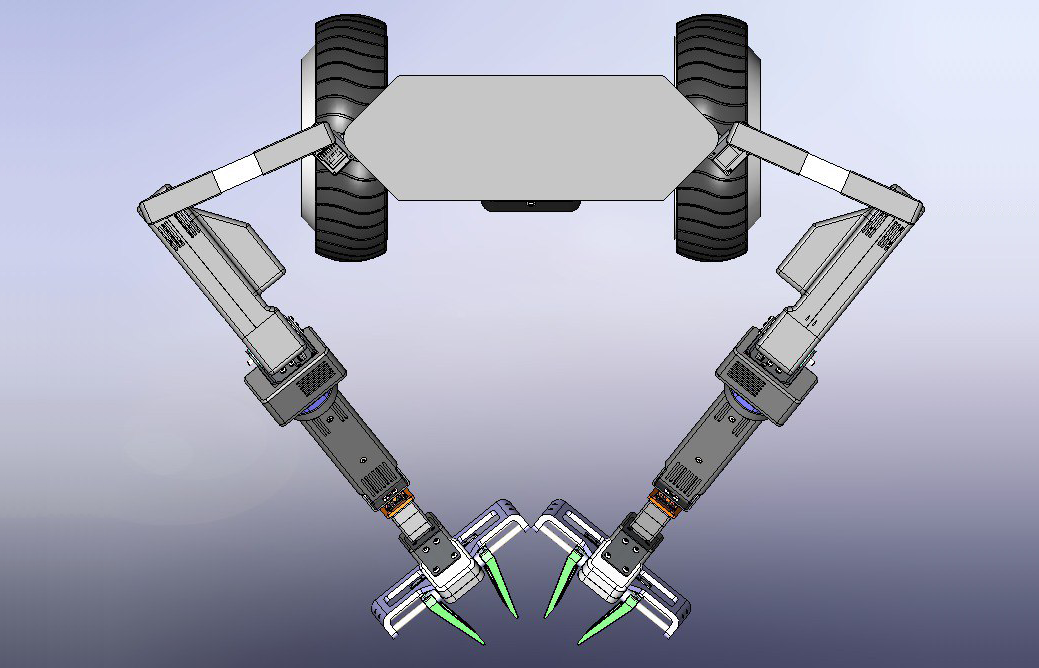
En los últimos dos meses avanzamos con el robot de investigación Robo 9, finalizando su estructura y...
ALOHA 2 rompe ese paradigma. No es solo otro proyecto de investigación: es un paso audaz hacia la de...
Valoramos tu privacidad
Usamos cookies para mejorar tu experiencia de navegación, ofrecer anuncios o contenido personalizados y analizar nuestro tráfico. Puedes aceptarlas todas, rechazar las no esenciales o elegir cuáles permitir. Política de privacidad
Gestionar preferencias de cookies
Imprescindibles para el funcionamiento del sitio; no se pueden desactivar.
Nos ayudan a entender cómo usan el sitio los visitantes.
Se usan para mostrar anuncios relevantes y medir su rendimiento.
Habilitan funciones mejoradas y personalización.